| 一 、本章简介 本章以core-G1【STM32F103C8T6】核心板 +Q1 cenozoic开发板 +QAU04模块 蜂鸣片实验 之入门系列11工程为例,本例程结合Q1 cenozoic开发板与QAU04模块,通过将STM32通用定时器配置成脉冲宽度调制模式,来驱动蜂鸣片工作。
二、实验平台 1、硬件:core-G1核心板、QAU04模块、cenozoic开发板 2、编译软件:MDK-RAM Plus V5.26.2.0 3、STM32F10X固件库版本:3.5版本 4、仿真器:QQ14A编译调试器
三、版权声明 作者:职业劝退师 声明:转载请注明出处。 纠错/业务合作:1911996023@qq.com 本例程开源资料下载地址:http://www.enmaking.com/material/ma_xHYtSQGg core- G1【STM32F103C8T6】核心板购买链接: QQ14A编译调试器购买链接: https://item.taobao.com/item.htm?spm=a1z10.3-c-s.w4002-22623360017.13.407d38d5ciC9zV&id=624413749124
四、实验前提 1、在进行本文步骤前,请先阅读以下章节 1)《STM32中文参考手册_V10》的十三至十五章节。 2)《STM32定时器的使用》全章内容 2、在进行本文步骤前,请先实现以下章节: 1)MDK5的软件安装。安装教程链接如下 http://www.enmaking.com/article/ar_cXHjU6Uj
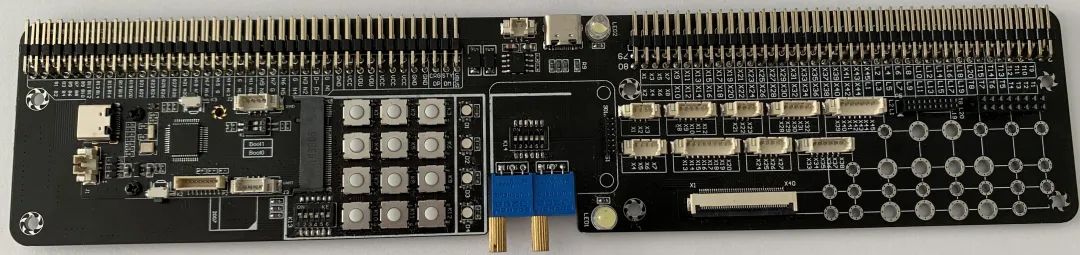
五、硬件原理 1、实物图 
2、连接说明 1)core-G1开发板插入pack-Q1底板的M1接口,并用螺丝固定住 2)蜂鸣片连接到QAU04的输出 3)用杜邦线连接以下接口 pack-Q1 QAU04 B20------>PWM VDD------>VCC GND------>GND 连接后实物如下 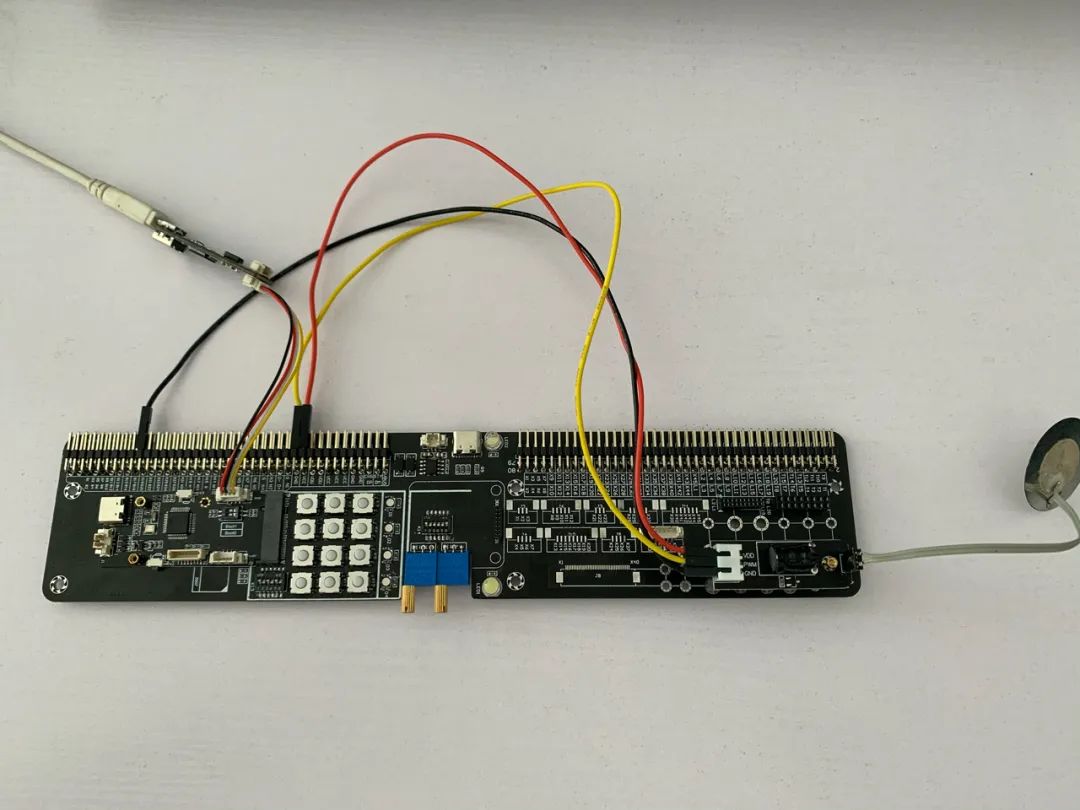
六、基础知识 具体有关蜂鸣片的介绍请参考以下文章。http://enmaking.com/article/ar_rSMM7lc8
脉冲宽度调制模式可以产生一个由TIMx_ARR寄存器确定频率、由TIMx_CCRx寄存器确定占空比的信号。在TIMx_CCMRx寄存器中的OCxM位写入’110’(PWM模式1)或’111’(PWM模式2),能够独立地设置每个OCx输出通道产生一路PWM。必须设置TIMx_CCMRx寄存器OCxPE位以使能相应的预装载寄存器,最后还要设置TIMx_CR1寄存器的ARPE位,(在向上计数或中心对称模式中)使能自动重装载的预装载寄存器。
七、实验步骤 1、编写通用定时器初始化程序。
//PWM输出初始化
//arr:自动重装值
//psc:时钟预分频数
void TIM1_PWM_Init(u16 arr,u16 psc)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB | RCC_APB2Periph_AFIO, ENABLE);
GPIO_PinRemapConfig(GPIO_PartialRemap_TIM3, ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
TIM_TimeBaseStructure.TIM_Period = arr;
TIM_TimeBaseStructure.TIM_Prescaler =psc;
TIM_TimeBaseStructure.TIM_ClockDivision = 0;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure);
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2;
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_Pulse = 0;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_Low;
TIM_OC2Init(TIM3, &TIM_OCInitStructure);
TIM_OC2PreloadConfig(TIM3, TIM_OCPreload_Enable);
TIM_ARRPreloadConfig(TIM3, ENABLE);
TIM_Cmd(TIM3, ENABLE);
}
2、将初始化程序添加到自己的工程中 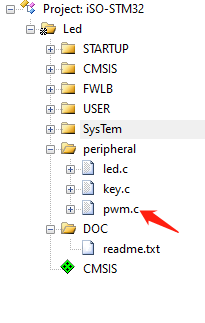
3、编写自己的业务代码
void buzzerQuiet(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_Cmd(TIM3, DISABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_ResetBits(GPIOB,GPIO_Pin_5);
}
void buzzerSound(unsigned short usFreq)
{
GPIO_InitTypeDef GPIO_InitStructure;
unsigned long ulVal
|